| Research: |
mobile robotics, multi-goal planning, path and motion planning, computational geometry, optimal sampling design, multi-robot systems, autonomous field navigation;
in general, topics related to a robotic system for autonomous long-term environment monitoring
Current activities and projects:
|
| Awards: |
- 2013 - Dean award for an exceptional master thesis of Lenka Mudrová, a master student supervised by me, on a topic Entropy-Like Estimation Technique in Mobile Robot Localization (info).
- 2013 - Fulbright scholarship award for a visiting position at University of Southern California, Los Angeles in 2013/2014.
- 2011 - Antonin Svoboda prize for the best PhD dissertation in the Czech Republic - Czech Society for Cybernetics and Informatics.
- 2010 - Best Paper Award for the Symposium Theory and Applications of Artificial Intelligence (20th European Meetings on Cybernetics and Systems Research).
- 2009 - 1st place in RoboTour outdoor delivery challenge.
- 2009 - Dean award for an exceptional master thesis of Jan Mačák, a master student supervised by me, on a topic Multi-Robot Cooperative Inspection Task (info).
- 2008 - 1st place in RoboTour outdoor delivery challenge
- 2008 - Dean award for an exceptional master thesis of Vojtěch Vonásek, a master student supervised by me, on a topic Trajectory Generation for Cooperative Inspection Task.
- 2007 - 3rd place in RoboTour outdoor delivery challenge.
- 2006 - 3rd place in RoboTour outdoor delivery challenge.
|
|

|
Miroslav Kulich, Jan Chudoba, Karel Košnar, Tomáš Krajník, Jan Faigl, Libor Přeucil.
SyRoTek - Distance Teaching of Mobile Robotics.
IEEE Trans. Education 56(1):18-23, 2013.
|
|
Jan Faigl, T. Krajník, V. Vonásek, and L. Přeučil.
On Localization Uncertainty in an Autonomous Inspection.
ICRA, 1119-1124, 2012.
|
|
Jan Faigl, Miroslav Kulich, Libor Přeučil.
Goal assignment using distance cost in multi-robot exploration.
IROS, 3741-3746, 2012.
|

|
Martin Saska, Tomáš Krajník, Jan Faigl, Vojtěch Vonásek, Libor Přeučil.
Low cost MAV platform AR-drone in experimental verifications of methods for vision based autonomous navigation.
IROS, 4808-4809, 2012.
|
|
Alejandro Vazquez-Otero, Jan Faigl, Alberto P. Munuzuri.
Path planning based on reaction-diffusion process.
IROS, 896-901, 2012.
|
|
Jan Faigl, Miroslav Kulich, and Libor Přeučil.
A sensor placement algorithm for a mobile robot inspection planning.
Journal of Intelligent & Robotic Systems, 62(3-4):329-353 2011.
doi: 10.1007/s10846-010-9449-0.
|
|
Jan Faigl, Miroslav Kulich, Vojtěch Vonásek, and Libor Přeučil.
An Application of Self-Organizing Map in the non-Euclidean Traveling Salesman Problem.
Neurocomputing 74:671-679, 2011.
doi: 10.1016/j.neucom.2010.08.026.
|
|
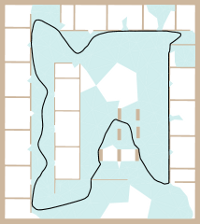
Jan Faigl.
Approximate Solution of the Multiple Watchman Routes Problem with Restricted Visibility Range.
IEEE Transactions on Neural Networks, 21(10):1668-1679, 2010.
doi: 10.1109/TNN.2010.2070518
|
|
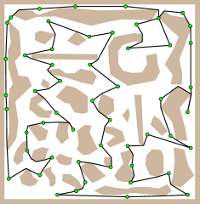
Jan Faigl, Vojtěch Vonásek, and Libor Přeučil.
A Multi-Goal Path Planning for Goal Regions in the Polygonal Domain
In Proceedings of the 5th European Conference on Mobile Robots. 171-176, 2011.
|

|
T. Krajník, Jan Faigl, V. Vonásek, K. Košnar, M. Kulich, and L. Přeučil.
Simple yet stable bearing-only navigation
Journal of Field Robotics, 27(5):511-533, 2010,
doi: 10.1002/rob.20354
[pdf].
|
|
Jan Faigl, T. Krajník, V. Vonásek, and L. Přeučil.
Surveillance Planning with Localization Uncertainty for UAVs.
In 3rd Israeli Conference on Robotics, Ariel, 2010, [pdf].
|
|
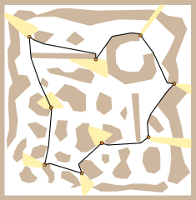
Jan Faigl.
On the Performance of Self-Organizing Maps for the non-Euclidean Traveling Salesman Problem in the Polygonal Domain.
Information Sciences, 181(19):4214-4229, 2011.
doi: 10.1016/j.ins.2011.05.019
|
|
Jan Faigl, Libor Přeučil.
Self-Organizing Map for the Multi-Goal Path Planning with Polygonal Goals.
In T. Honkela et al. (Eds.): ICANN 2011, Part I, LNCS 6791, 85-92, 2011.
|
|

