Research and projects
AgentDrive-City
City is a challenging environment for intelligent vehicles. Collision avoidance, dealing with the traffic junctions and adaptive path planning are examples of existing challenges.
Our agent-based simulations combine features of traffic simulations with realistic driving simulation. We integrate structured road network data with realistic physics and visualization. We work with OpenStreetMap and elevation data to provide reality-based scenarios.

Download:
Concept videos:AgentDrive-Highway
Collision avoidance, cooperation and generally coordination is in our interest. Highway is the simplest domain for advanced coordination methods.
Multi-agent Traffic Simulation For Human-in-the-Loop Cooperative Drive Systems Testing
Nomination for the Best Demo Award at the 13th International Conference on Autonomous Agents and Multiagent Systems
This demonstration presents the integrated multi-agent traffic simulation for human-in-the-loop cooperative drive systems testing. Its openness and flexibility supports a wide range of testing and validation possibilities for the researchers and developers in the field of autonomous vehicles, cooperative drive, driver assistants, and HMI design and development. The system is able to integrate various driving simulators, car control techniques, cooperative car coordination and user-driven vehicles. The usability of the system is demonstrated in various scenarios and configurations.


Download
FelFest 2014
We presented our driving simulator to public at the music and tech festival of our faculty. Photos from FelFest


A cooperative driver model for traffic simulations
In this paper, a cooperative driver model for a multi-agent traffic simulation is proposed. The model combines maneuver-based trajectory planning of the vehicles with a cooperative conflict resolving. The proposed model is able to provide a safe drive in complex traffic situations at the highest possible speed. The idea of the model and its feasibility have been verified in complex scenarios such as line change under heavy traffic, highway entering or highway crossing. Moreover, the developed cooperative driver model is being integrated with a human operated driving simulator that enables verification of the proposed model in mixed scenarios enriching the simulation for a human driver with highly cooperative background traffic; thus, providing a platform for further studies on benefits of assistive technologies. The paper provides description of the proposed model and its early evaluation on the selected scenarios in a multi-agent traffic simulation.
Download
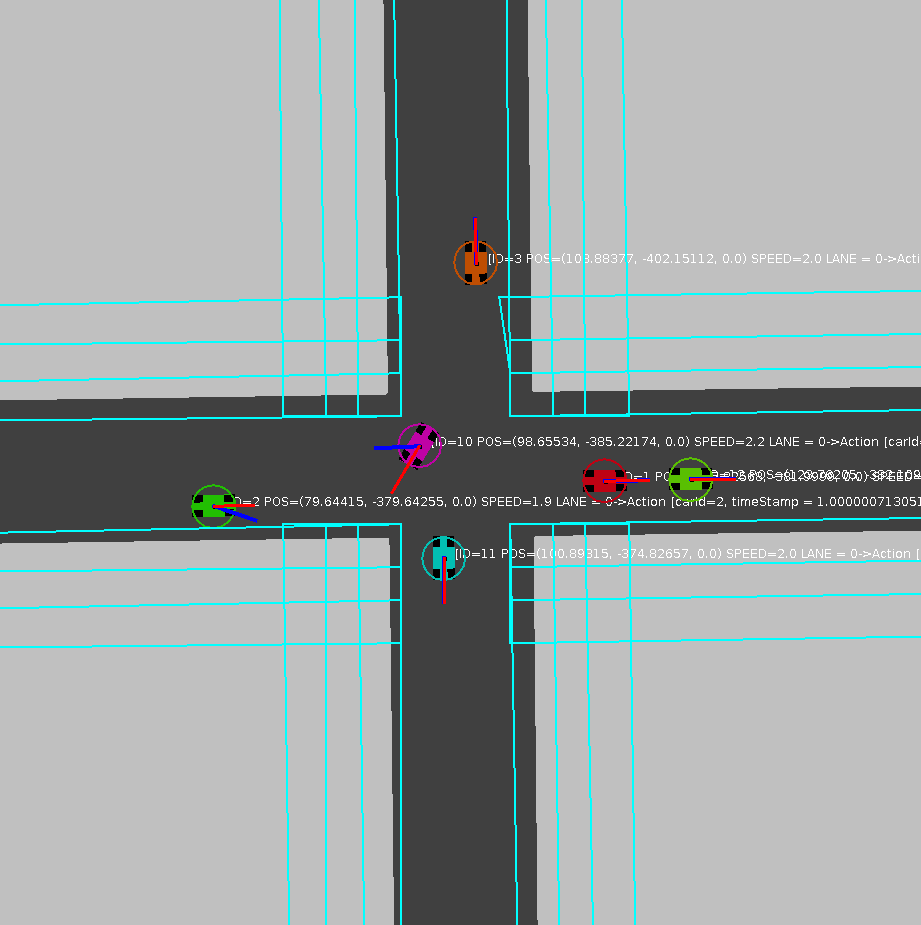
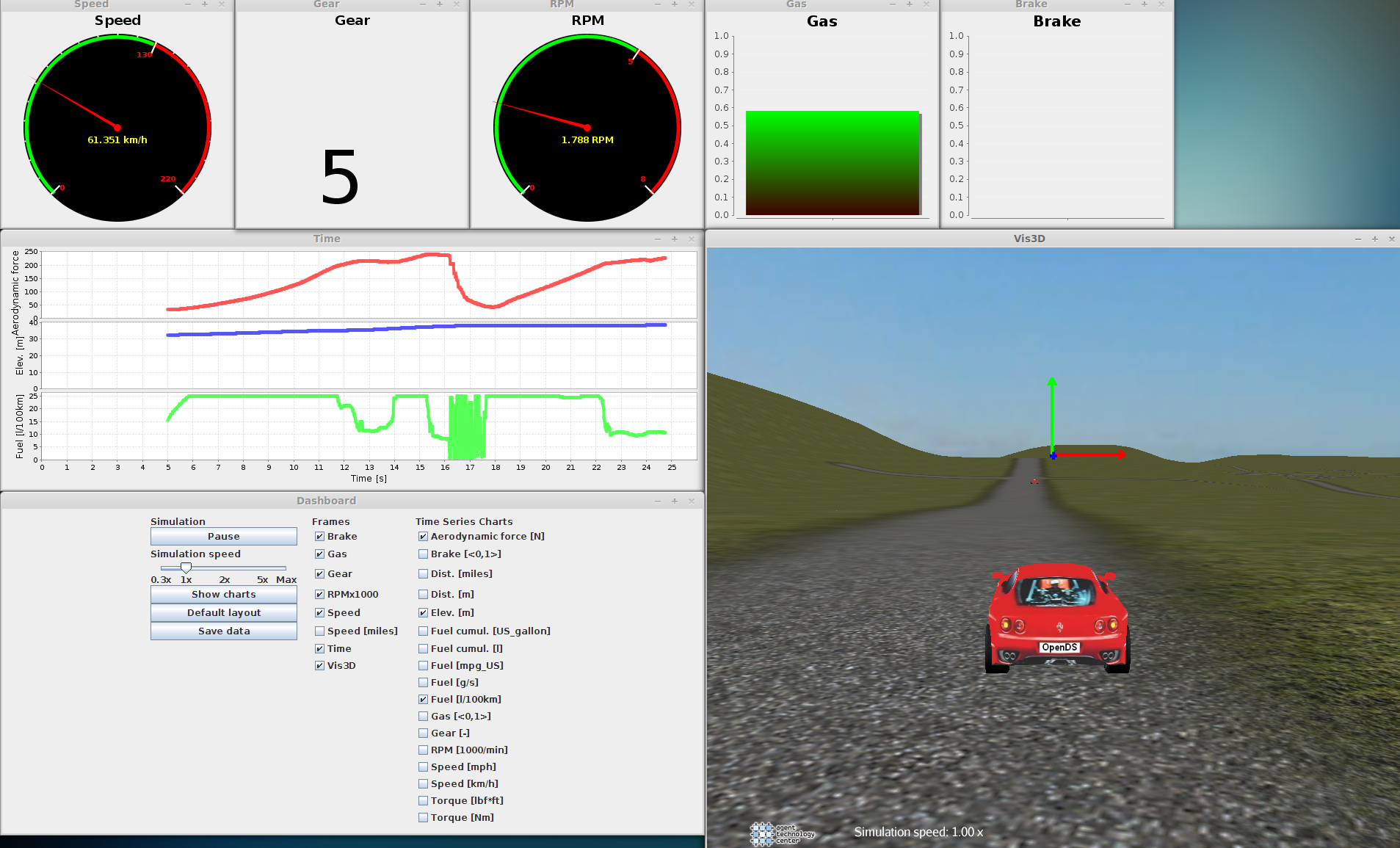
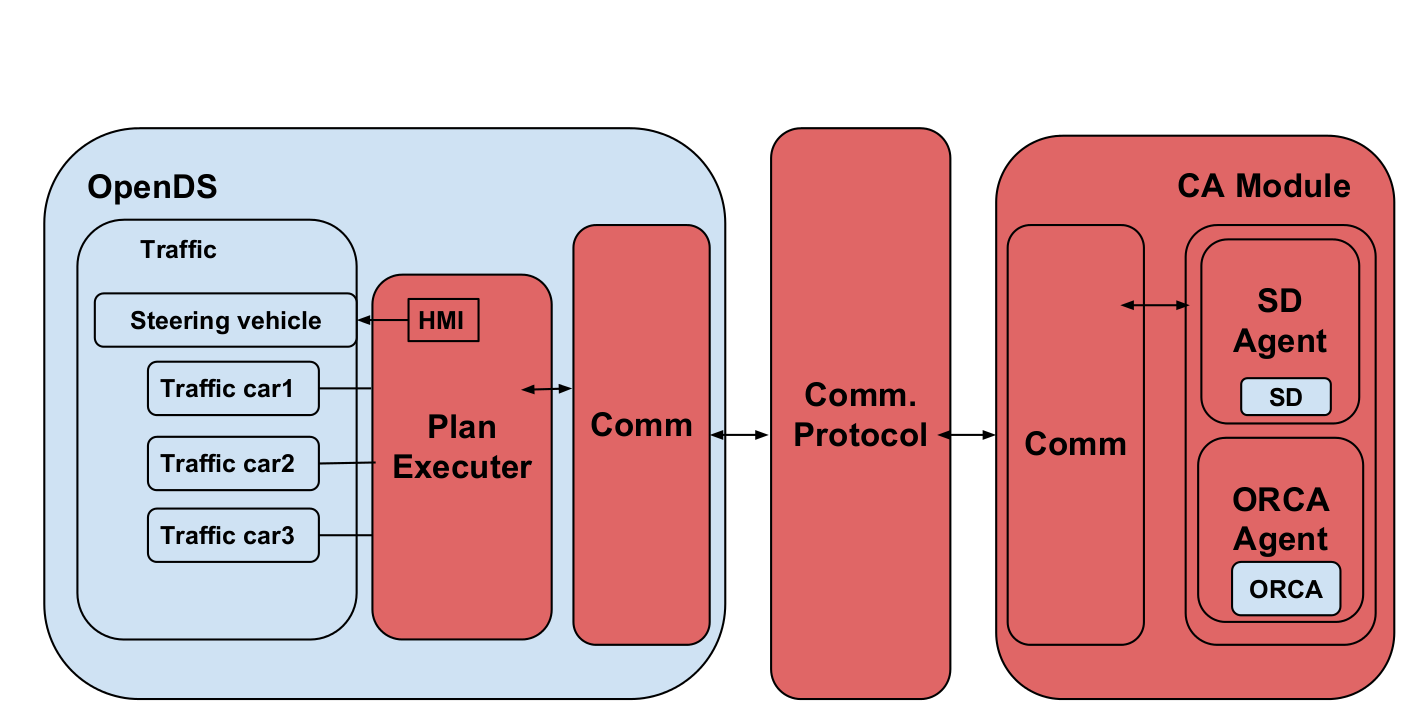
Collision Avoidance of Highway Traffic
We designed and implemented a system integrating driving simulator with a collision avoidance module. The system performs simulation of driving on the highway with traffic. There are two integrated collision avoidance methods in the module. One is based on the observance of the Safe Distance and the second implements Optimized Reciprocal Collision Avoidance (ORCA) algorithm. The module communicates with the driving simulator and provides instructions for vehicles. Traffic vehicles execute instructions autonomously. The driven vehicle visualize the instruction for a human driver. The proof-of-concept experiments show the possibilities of application of the system for a human-in-the-loop simulations as well as for studies of collision avoidance techniques for traffic vehicles on a highway.

Download
- M. Schaefer. Collision Avoidance of Highway Traffic, 2014. Czech Technical University in Prague, Czech Republic. pdf
- P. Janovský. Cooperative Collision avoidance of Road Vehicles, 2011. Czech Technical University in Prague, Czech Republic. pdf
- M. Schaefer. Noncooperative collision avoidance of road vehicles, 2011. Czech Technical University in Prague, Czech Republic. pdf